



この記事では、ソニーのオンライン学習サービス「CREATE by KOOV」の体験内容を紹介します。
今回は「がくしゅうコース」>「はじめてのロボットプログラミング」>ステージ6「サーボモーターのせいぎょ」です。
がくしゅうコース
ひとつずつ学びながらスキルを上げていくコースです。
はじめてのロボットプログラミング
ロボットの動きを観察しながら、アプリや電子パーツの使い方、プログラミングの方法を学びます。
ステージ6「サーボモーターのせいぎょ」
センサーやモーターをつかってペンギンの動きをプログラムします。
次の画像または目次をクリックすると読み飛ばしできます。
タップできる目次
はじめてのロボットプログラミング ステージ6「サーボモーターのせいぎょ」でわかること

ステージ6「サーボモーターのせいぎょ」では、センサーやモーターをつかってペンギンの動きをプログラミングします。
ペンギンの動きをつくるなんて楽しみ!

さいな

だんにゃあ
ロボットっぽいよね!
今回はじめて使う部品は「サーボモーター」です。
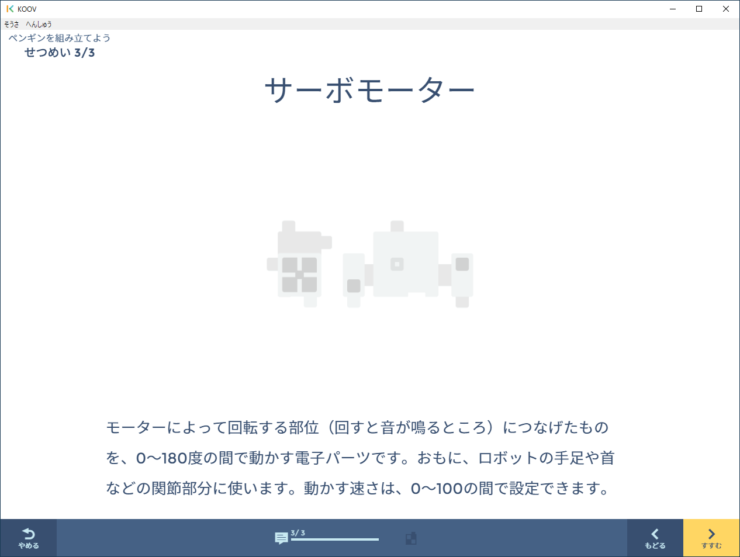
サーボモーターは、軸を思い通りの角度に動かすことができます。
DCモーターとの違いは角度を制御できるか、できないかです。
| DCモーター | サーボモーター |
|---|---|
| 角度制御できない | 角度制御できる |
KOOVブロックで組み立てたペンギンはこちら。

このペンギンには「赤外線フォトリフレクタ」や「ブザー」も組み込まれています。
ステージ6「サーボモーターのせいぎょ」には、次のミッションが用意されています。
はじめてのロボットプログラミング ステージ6「サーボモーターのせいぎょ」をはじめる
ステージ6「サーボモーターのせいぎょ」をはじめるための準備について説明します。
必要なもの
はじめてのロボットプログラミング ステージ6「サーボモーターのせいぎょ」をはじめるには次のものが必要です。
- KOOVスターターキット・KOOVアドバンスキットのどちらか
- KOOVアプリがインストールされたパソコン
KOOVスターターキットはこちらです。

KOOVアドバンスキットはこちらです。

KOOVアプリを起動してステージ6「サーボモーターのせいぎょ」を表示する
はじめてのロボットプログラミング ステージ6「サーボモーターのせいぎょ」を行うには、次のステップで操作します。
- STEP
KOOVアプリを起動する。
- STEP
プレイヤーを選択する。

- STEP
「がくしゅうコース」を選択する。
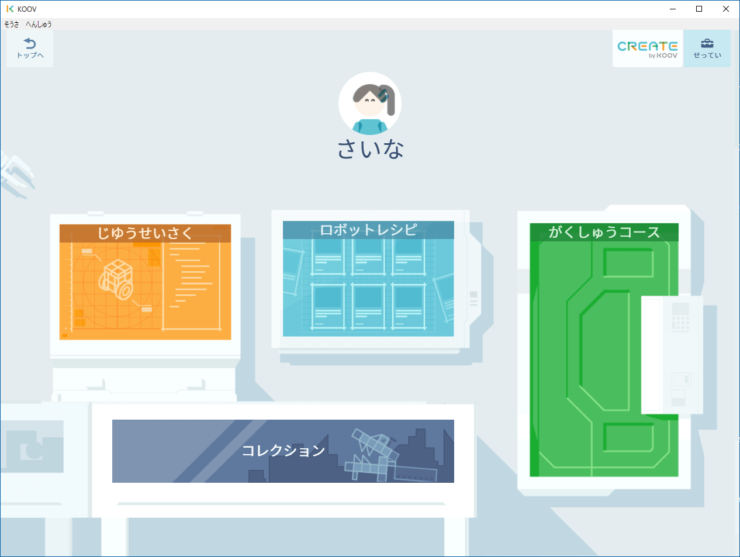
- STEP
「はじめてのロボットプログラミング」を選択する。

- STEP
ステージ6「サーボモーターのせいぎょ」を選択する。
下の図の「つぎのステージ」のところがステージ6です。
だんにゃあ
ブロックで作ったペンギンが目印だよ。
はじめてのロボットプログラミング ステージ6「サーボモーターのせいぎょ」をやってみた
はじめてのロボットプログラミング ステージ6「サーボモーターのせいぎょ」には次の4つのミッションがあります。
ミッション1 ペンギンを組み立てよう

ミッション1は「ペンギンを組み立てよう」です。
KOOVブロックで「ペンギン」を組み立てる。

はじめてのロボットプログラミング ステージ6「サーボモーターのせいぎょ」で、はじめて使う電子パーツはこちらです。
- サーボモーター
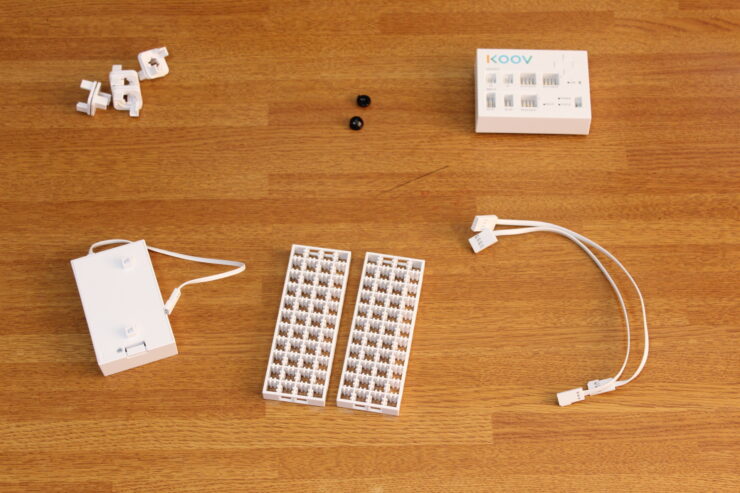
ペンギンをつくるために準備するパーツはこちら。


- ハーフC ブルー × 35
- ハーフD オレンジ × 7
- ハーフD パープル × 8
- 三角 イエロー × 1
- 三角 ブルー × 4
- ブザー × 1
- 赤外線フォトリフレクタ × 1
- サーボモータ × 1
- 回転軸 × 4
- アイ × 2
- コア(本体) × 1
- バッテリーボックス × 1
- ベーストレー × 2
- 3芯ケーブル(20cm) × 2
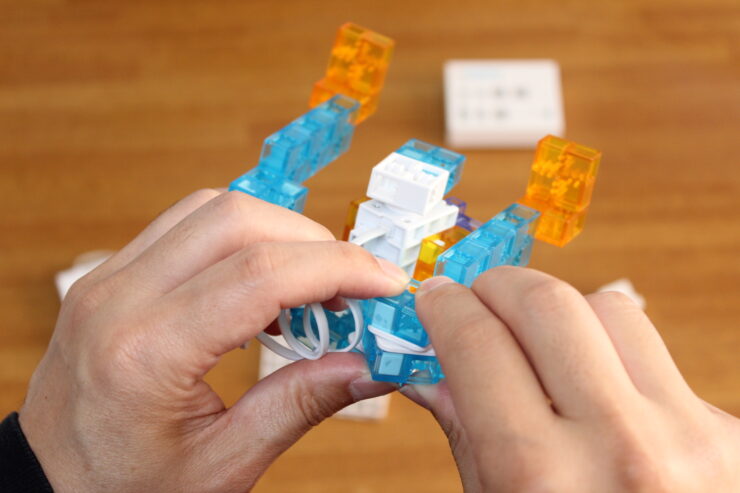
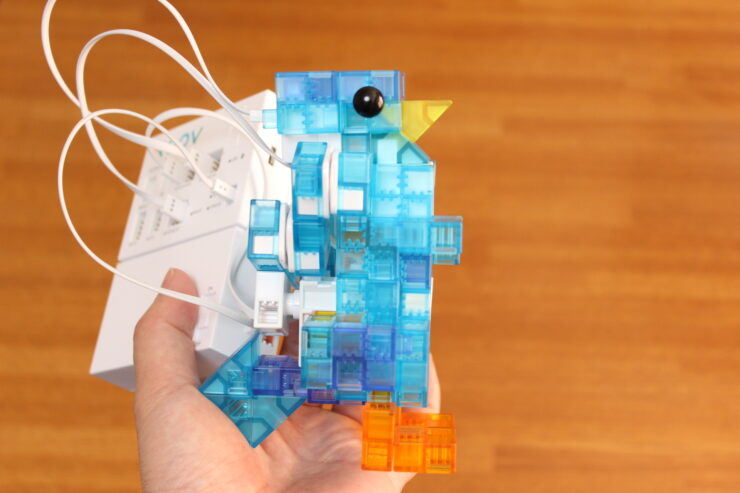
実物のパーツはこちらです。

説明アニメーションを見ながら組み立てていきます。
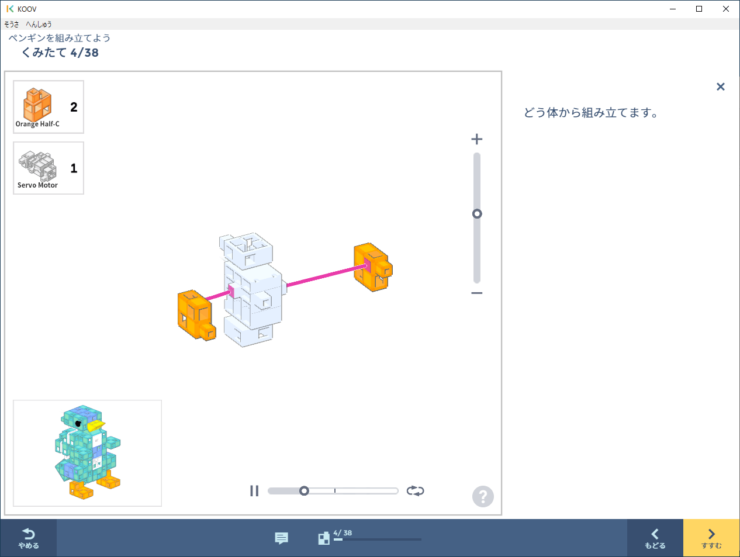
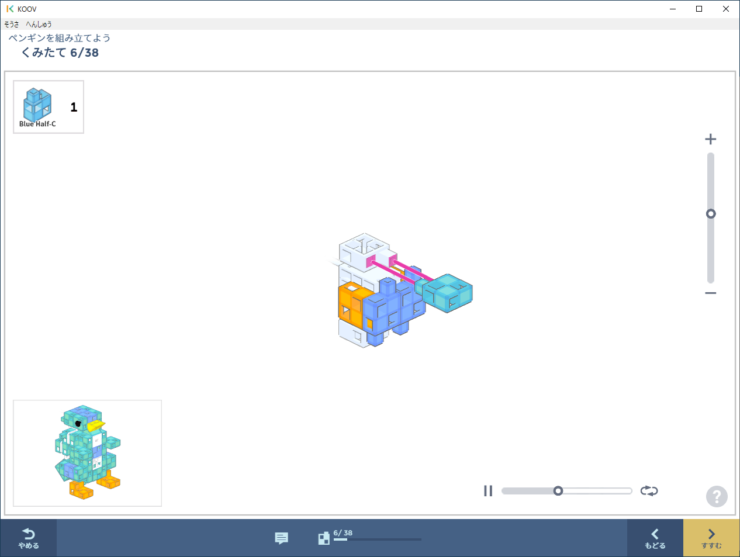
わかりにくいところはアニメーションの視点を変えてどんどん作ります。



完成!
さいな

ペンギンらしくなりました。
正面の写真はこちら。
横から見るとこんな感じ。
背面はこちら。
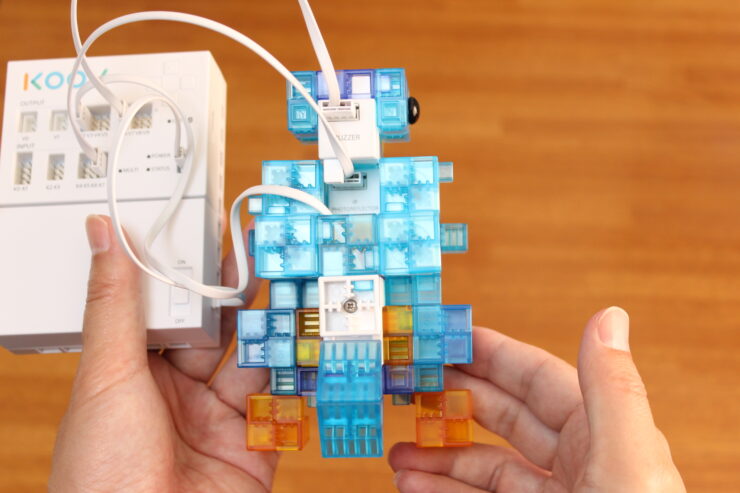
サーボモータで制御する機構は背面側にあります。
ペンギンが完成したので、ミッション1は終了です。
バッジをゲットしました。

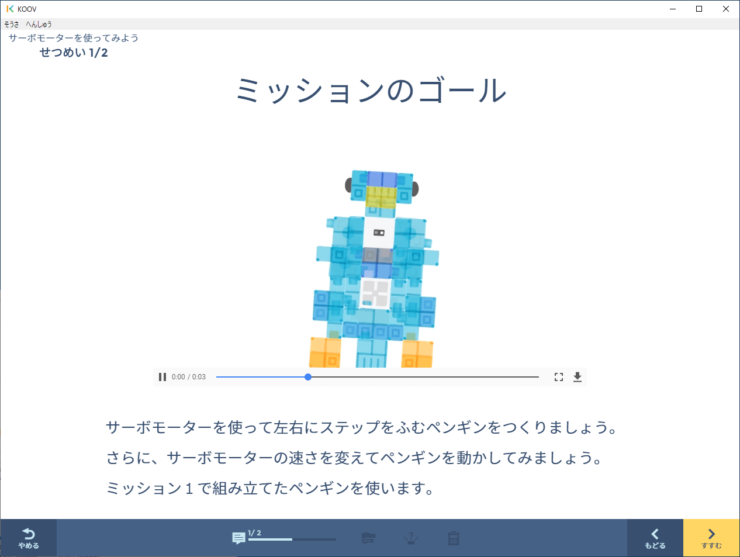
ミッション2 サーボモーターを使ってみよう

ミッション2は「サーボモーターを使ってみよう」です。
サーボモータを使って左右にステップをふむペンギンをつくります。
さらに、サーボモータの速さを変えてペンギンを動かします。
だんにゃあ
ミッション1で組み立てたペンギンを使うよ。
どんな動きをするのかしら?
さいな
プログラムのイメージを確認します。

ミッション2では、サーボモータの速さの指定と角度を変更することを学ぶようです。
説明に従ってプログラムを作っていき、できたのがこちら。

指定した「はやさ」で指定した「かくど」に動かす処理をくり返しています。
単純な足踏みをするプログラムなのでくり返し処理で簡単に作れました。
これでミッション2は終了です。
バッジをゲットしました。

ミッション3 マルチLEDを使ってみよう

ミッション3は「マルチLEDを使ってみよう」です。
マルチLEDの使い方を練習します。
また、ブザーを使ってペンギンの鳴き声をプログラムします。

マルチLED?

さいな
マルチLEDはコア(本体)にあるLEDです。
次の写真のグリーンに光っている「MULTI」と書かれているLEDがマルチLEDです。

だんにゃあ
LEDはプログラムの状態を知るために使うこともあるよ。
プログラムのイメージはどんな感じでしょう?
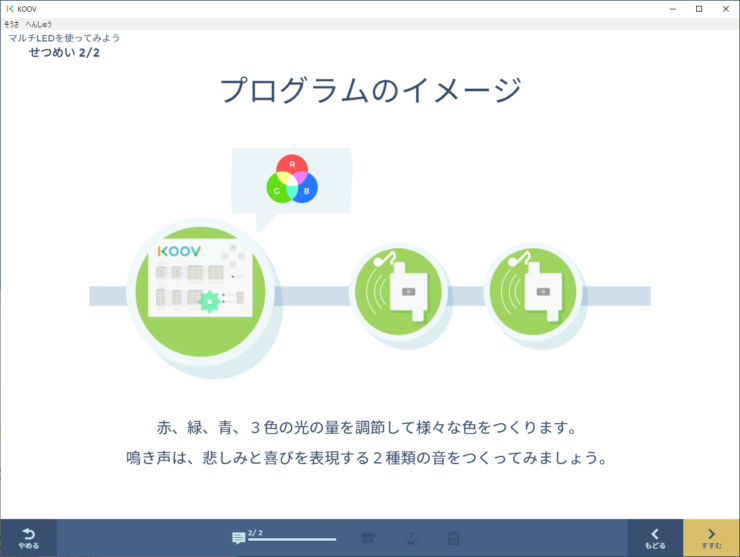
LEDは設定した好きな色に光らせることができます。
色の設定は、光の3原色であるR(赤)・G(緑)・B(青)で指定します。
光の3原色は、光で色を作る時に基本となる赤・緑・青のことです。
まずはLEDの色を順番に変えていくだけのプログラムを作成し、LEDの光らせ方を学びます。

「R」「G」「B」のそれぞれに値を設定して光る色を変えました。
次は鳴き声をプログラミングします。
悲しそうな声とうれしそうな声をつくりました。
次のプログラムがうれしそうな声のプログラムです。
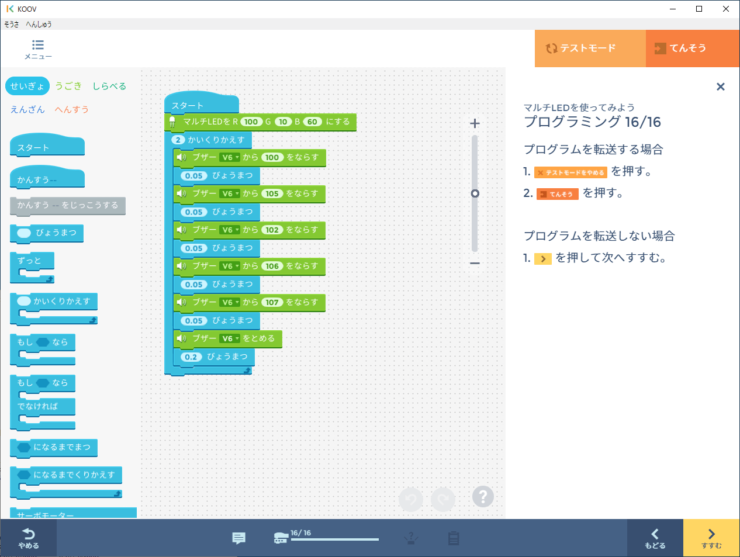
ブザーで声や音を出すのは地道に書くプログラムになるんですね。
これでミッション3は終了です。
バッジをゲットしました。

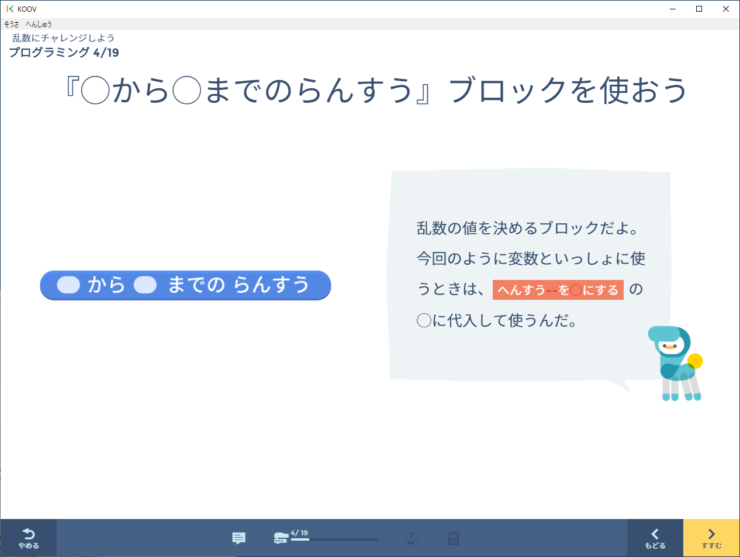
ミッション4 乱数にチャレンジしよう

ミッション4は「乱数にチャレンジしよう」です。
赤外線フォトリフレクタにふれるとペンギンが反応し、さらにその反応がランダムに変わるプログラムをつくります。

プログラムのイメージを確認します。

動きを2つつくり、乱数を使ってどちらの動きを行うか判断するということですね。
乱数?
さいな
だんにゃあ
乱数は「らんすう」と読むんだ。
何が出るかわからない値のことだよ。
乱数を使うための「○から○までのらんすう」ブロックが用意されています。
これは便利ですね。
「○から○までのらんすう」ブロックを使えば、指定した範囲の値を取り出すことができます。
では、プログラムを作成。
うれしいときの動きと、かなしいときの動きをそれぞれ関数にし、メインプログラムから乱数でどちらを呼び出すか決めるプログラムです。
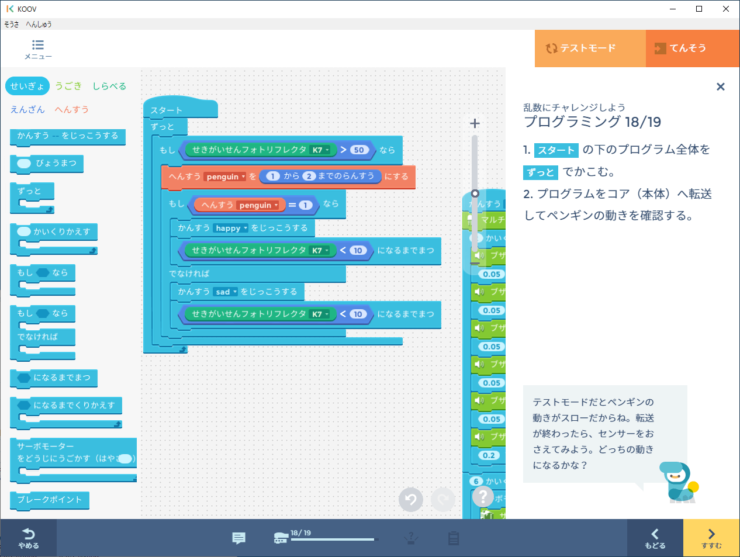
変数の「penguin」に乱数を読み込んで if 文で呼び出す関数を選ぶ構成です。
関数を使うとメインプログラムはスッキリしますね。
動作を確認しミッション4は終了です。
子供達も楽しいみたいで何度も遊んでいました。
バッジをゲットしました。

全てのミッションをクリアしたのでステージクリアです。

はじめてのロボットプログラミング ステージ6「サーボモーターのせいぎょ」のまとめ
今回は、ソニーのオンライン学習サービス「CREATE by KOOV」の、はじめてのロボットプログラミング ステージ6「サーボモーターのせいぎょ」の体験内容を紹介しました。
ステージ6「サーボモーターのせいぎょ」では、センサーやモーターをつかってペンギンの動きをプログラムしました。
プログラミングっぽいことできるようになってきたわ。
さいな
だんにゃあ
動いてくれると楽しいよね。
前のステージ「DCモーターで回転運動」の記事はこちらです。
【KOOV】はじめてのロボットプログラミング ステージ5「DCモーターで回転運動」
「CREATE by KOOV」公式サイトはこちらです。