



この記事では、ソニーのオンライン学習サービス「CREATE by KOOV」の体験内容を紹介します。
今回は「がくしゅうコース」>「はじめてのロボットプログラミング」>ステージ4「きょりの検知と音の表現」です。
がくしゅうコース
ひとつずつ学びながらスキルを上げていくコースです。
はじめてのロボットプログラミング
ロボットの動きを観察しながら、アプリや電子パーツの使い方、プログラミングの方法を学びます。
ステージ4「きょりの検知と音の表現」
人やものを検知してカシャっと動く、まるでカメラなロボットをつくります。
次の画像または目次をクリックすると読み飛ばしできます。
タップできる目次
はじめてのロボットプログラミング ステージ4「きょりの検知と音の表現」でわかること

ステージ4「きょりの検知と音の表現」では、人やものを検知してピカッと光ってカシャっと音がするカメラをつくります。
人を検知するのってむずかしそうだけど大丈夫かしら?

さいな

だんにゃあ
検知はセンサーに任せるだけだから簡単だよ。
今回はじめて使う部品は2つです。
ひとつ目が「赤外線フォトリフレクタ」です。

モノとの距離を計測するセンサーです。
プログラム上では距離を数値として取得できるので、この数値を使ってプログラムをつくります。
だんにゃあ
赤外線フォトリフレクタの数値が2倍だと距離が2倍ってことじゃないから注意してね。
今回はじめて使う部品ふたつ目はブザーです。

ブザーというと、「ブー」という音が鳴るだけかと思いきや、全部で60音も鳴るようです。
ブザーだけでも楽しめそう。

さいな
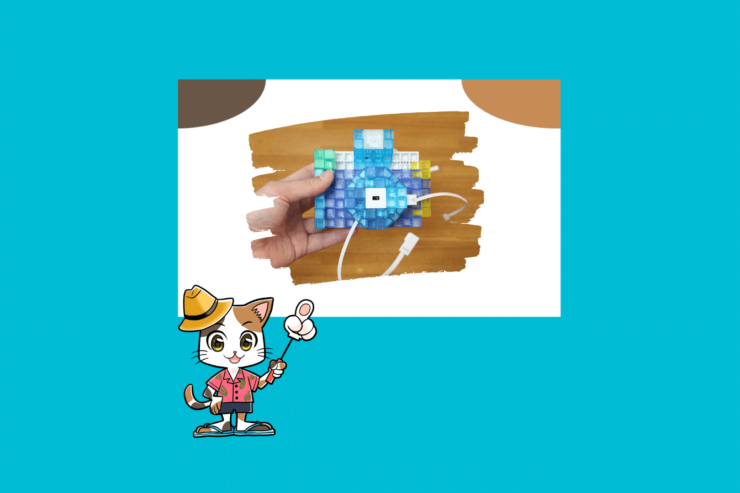
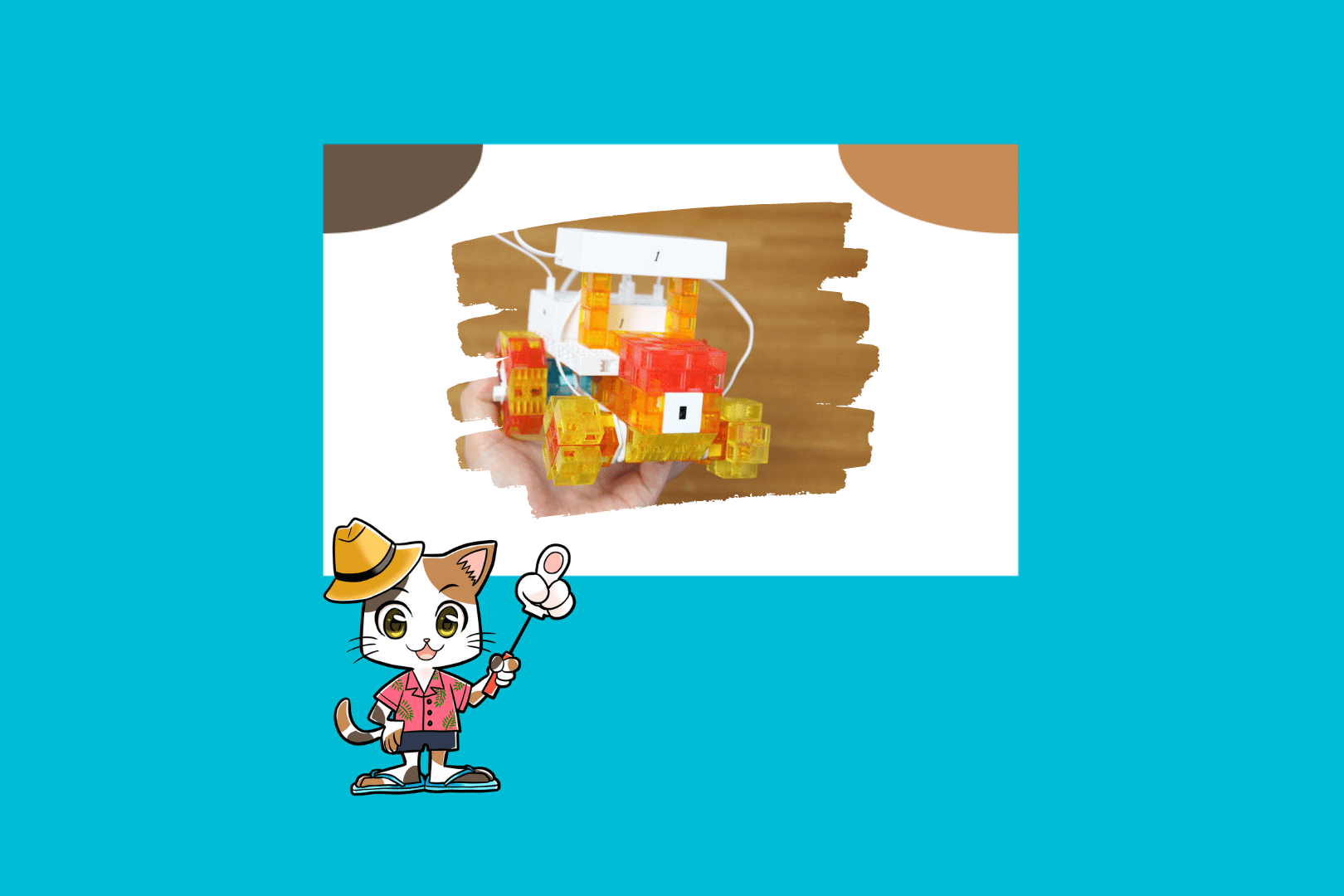
KOOVブロックで組み立てたカメラはこちら。
このカメラに「赤外線フォトリフレクタ」、「ブザー」、「LED」も組み込まれています。
これらの部品をプログラムで動かすということですね。
ステージ4「きょりの検知と音の表現」には、次のミッションが用意されています。
はじめてのロボットプログラミング ステージ4「きょりの検知と音の表現」をはじめる
ステージ4「きょりの検知と音の表現」をはじめるための準備について説明します。
必要なもの
はじめてのロボットプログラミング ステージ4「きょりの検知と音の表現」をはじめるには次のものが必要です。
- KOOVスターターキット・KOOVアドバンスキットのどちらか
- KOOVアプリがインストールされたパソコン
KOOVスターターキットはこちらです。

KOOVアドバンスキットはこちらです。

KOOVアプリを起動してステージ4「きょりの検知と音の表現」を表示する
はじめてのロボットプログラミング ステージ4「きょりの検知と音の表現」を行うには、次のステップで操作します。
- STEP
KOOVアプリを起動する。
- STEP
プレイヤーを選択する。

- STEP
「がくしゅうコース」を選択する。
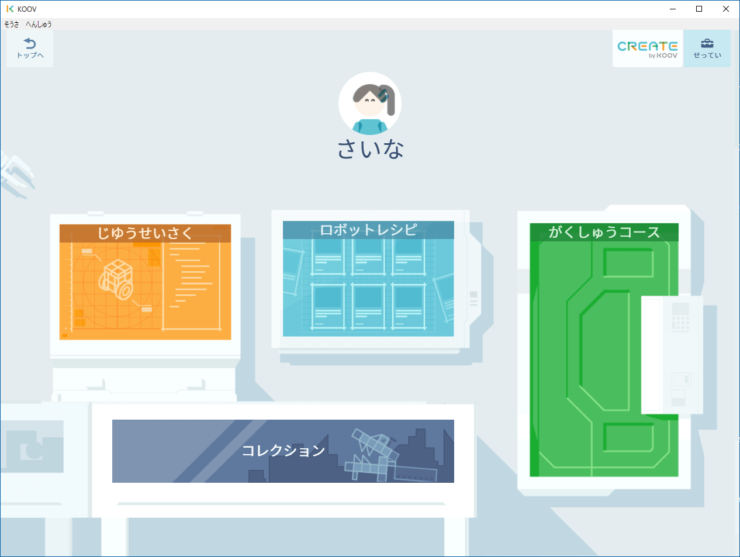
- STEP
「はじめてのロボットプログラミング」を選択する。

- STEP
ステージ4「きょりの検知と音の表現」を選択する。
下の図の「つぎのステージ」のところがステージ4です。
だんにゃあ
カメラの写真が目印だよ。
はじめてのロボットプログラミング ステージ4「きょりの検知と音の表現」をやってみた
はじめてのロボットプログラミング ステージ4「きょりの検知と音の表現」には次の4つのミッションがあります。
ミッション1 カメラを組み立てよう
ミッション1は「カメラを組み立てよう」です。
KOOVブロックで「カメラ」を組み立てる。

さぁ!やるわよ。
さいな
だんにゃあ
ブロックで形をつくるときが一番楽しそうだね。
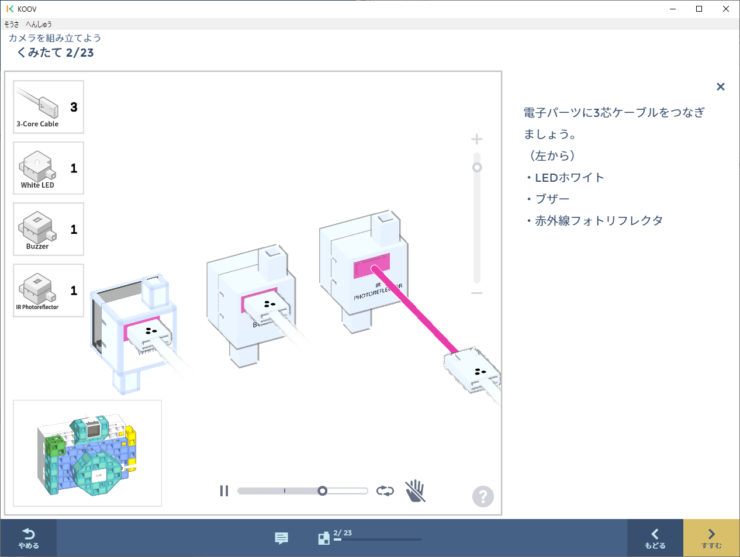
はじめてのロボットプログラミング ステージ4「きょりの検知と音の表現」で、はじめて使う電子パーツはこちらです。
- 赤外線フォトリフレクタ
- ブザー
では、カメラを作っていきます。
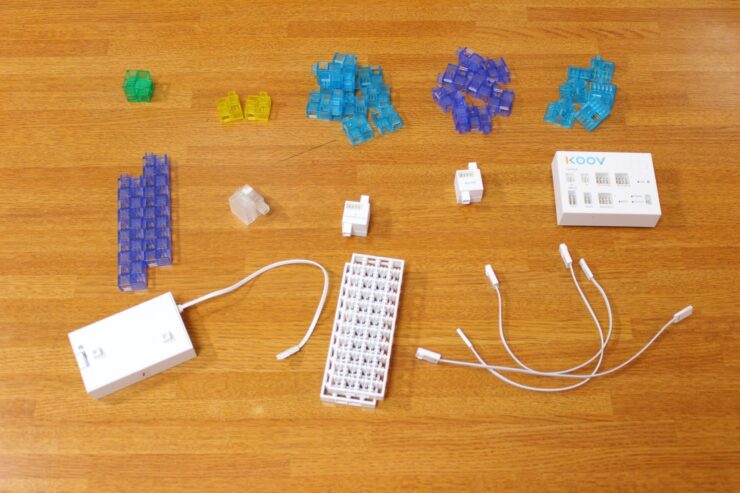
準備するパーツはこちら。

- キューブ グリーン × 1
- ハーフB イエロー × 2
- ハーフC ブルー × 11
- ハーフD パープル × 8
- 三角 ブルー × 7
- ビーム パープル × 2
- LED ホワイト × 1
- 赤外線フォトリフレクタ × 1
- ブザー × 1
- コア(本体) × 1
- バッテリーボックス × 1
- ベーストレー × 2
- 3芯ケーブル(20cm) × 3
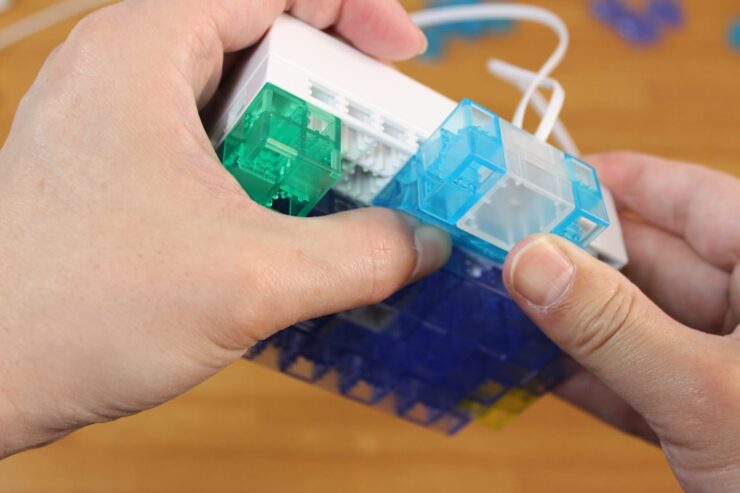
実物のパーツはこちらです。
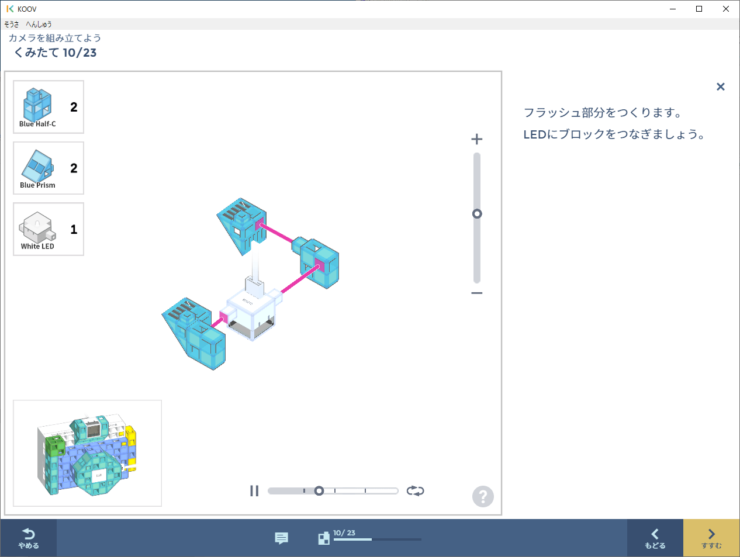
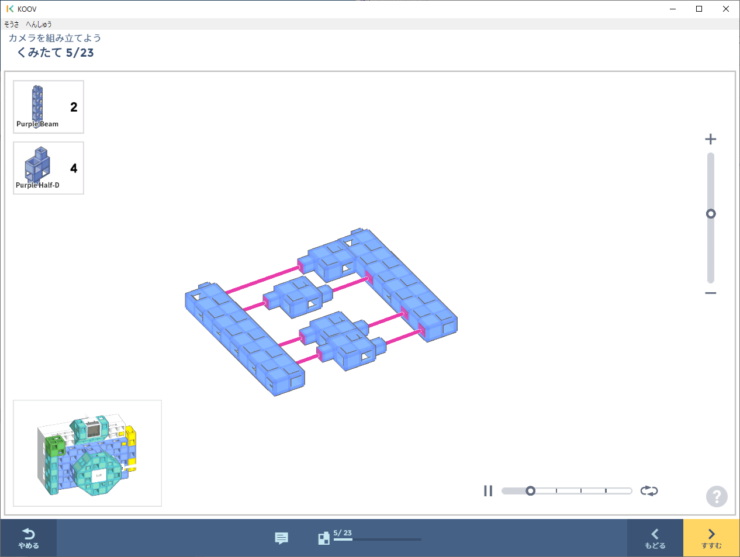
説明アニメーションを見ながら組み立てていきます。

だんにゃあ
画像はマウスでつまむと角度を変えることができるよ。
いろいろな角度で見るとわかりやすい!
さいな
こんな感じで、特に悩むこともなくどんどん作ることができます。
カメラっぽくなってきた!
さいな
もう一息がんばります。
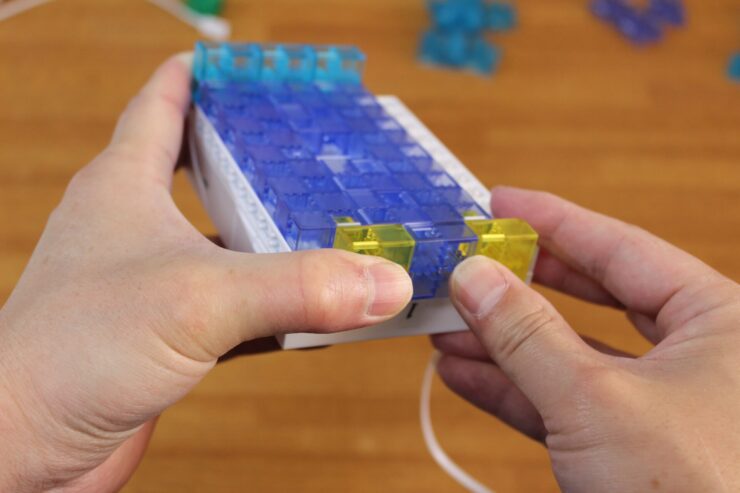
完成!
さいな
配線以外はできました。
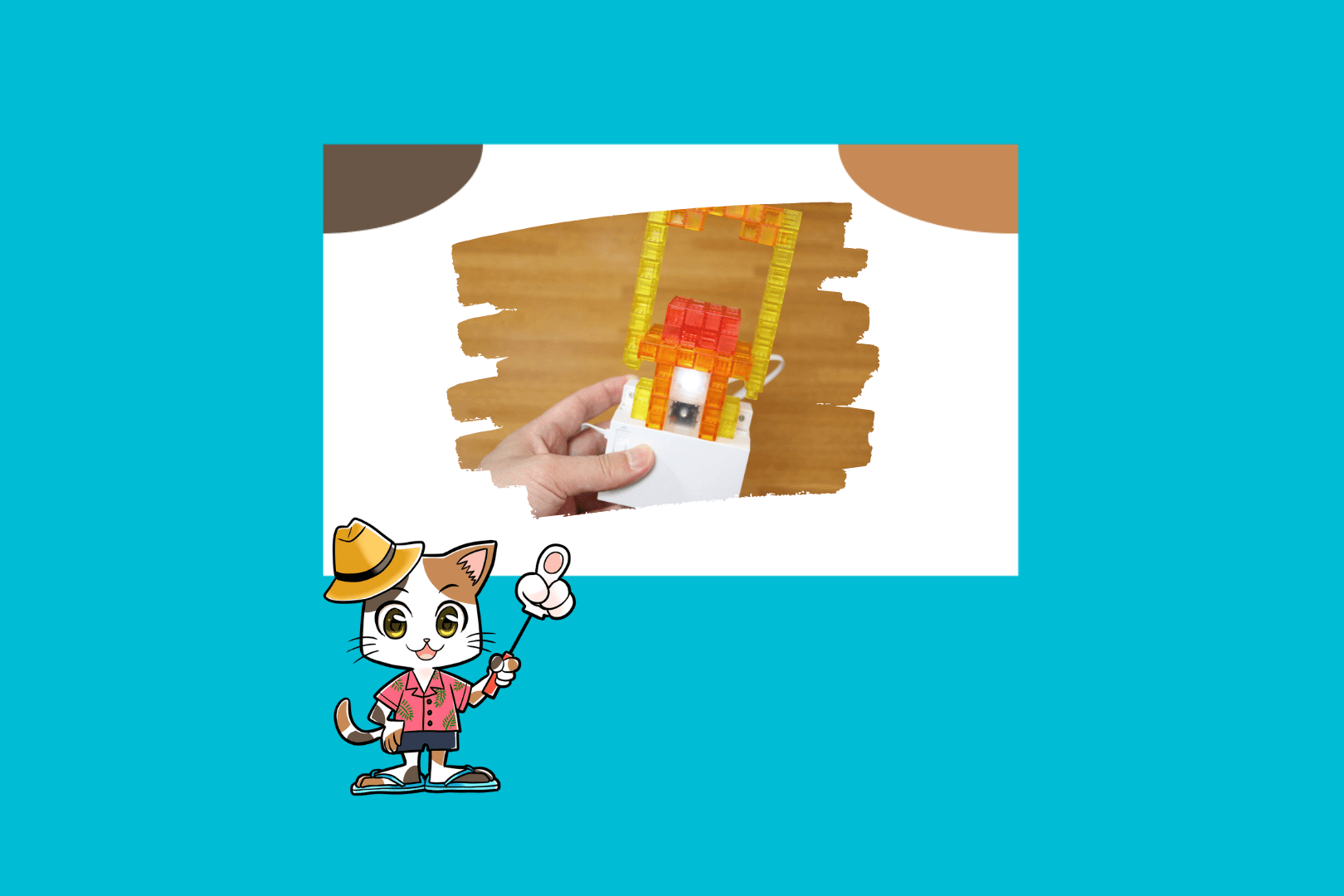
正面の写真はこちら。
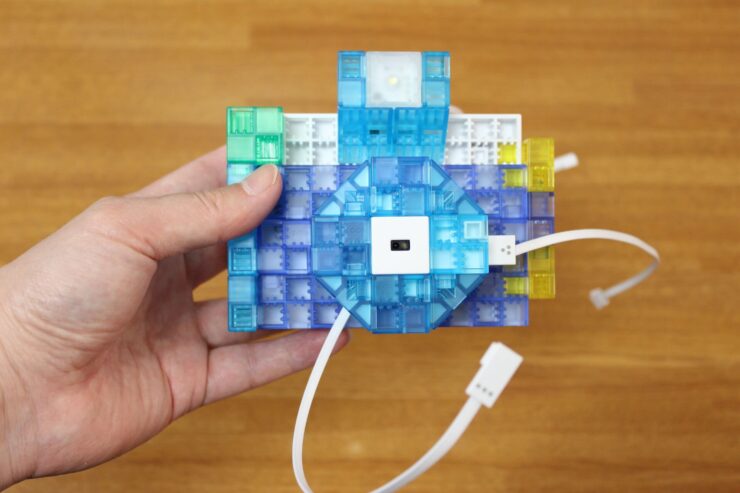
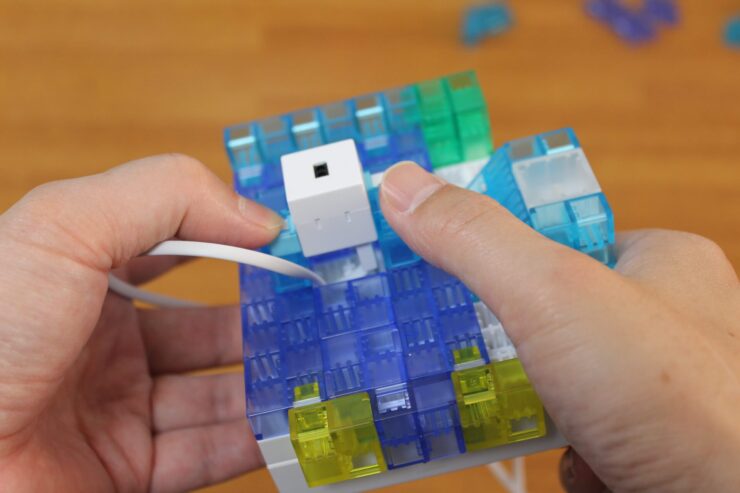
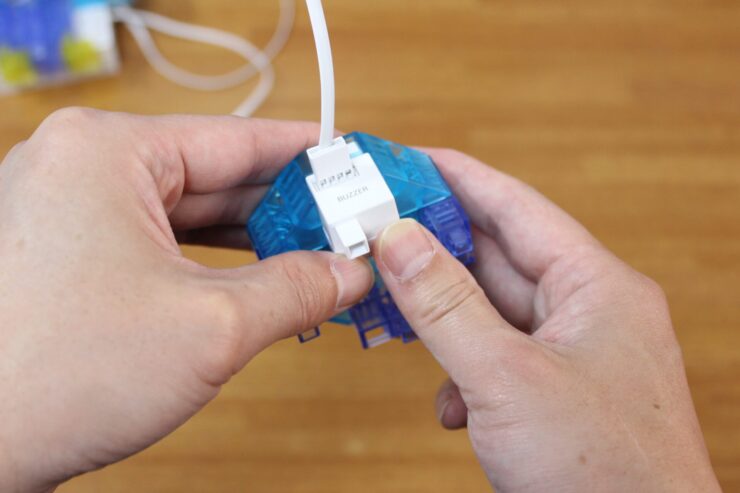
ななめから見ると配線はこんな感じです。
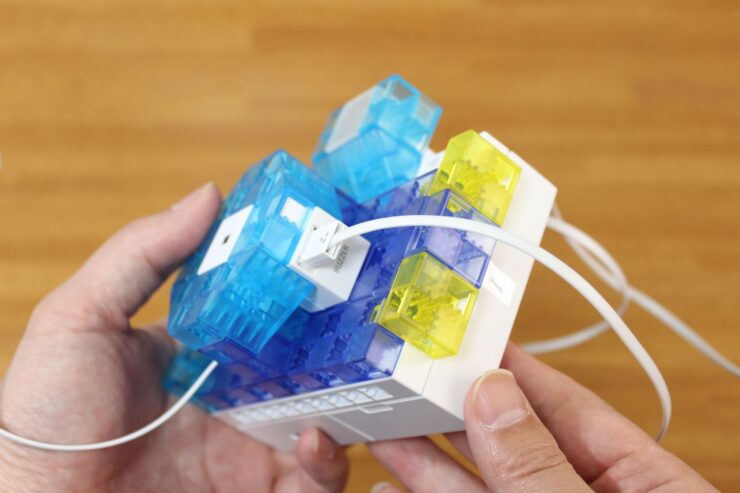
ブロックでつくるから配線まできれいにはできないか。

さいな
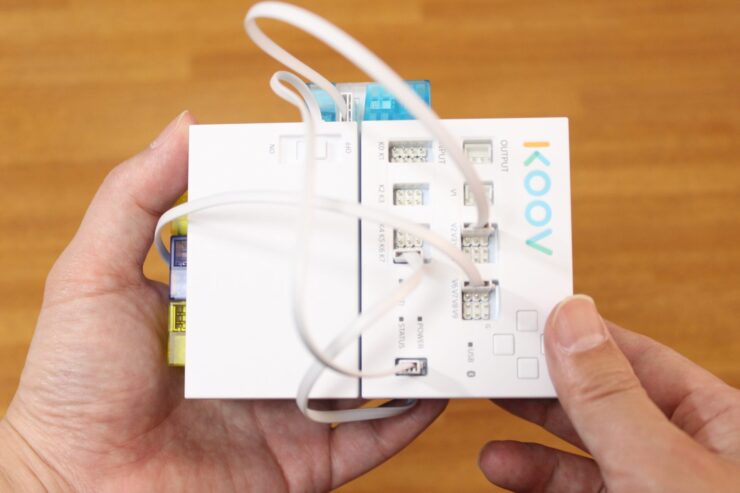
上から見るとこんな感じ。
配線後のカメラ背面はこうなっています。
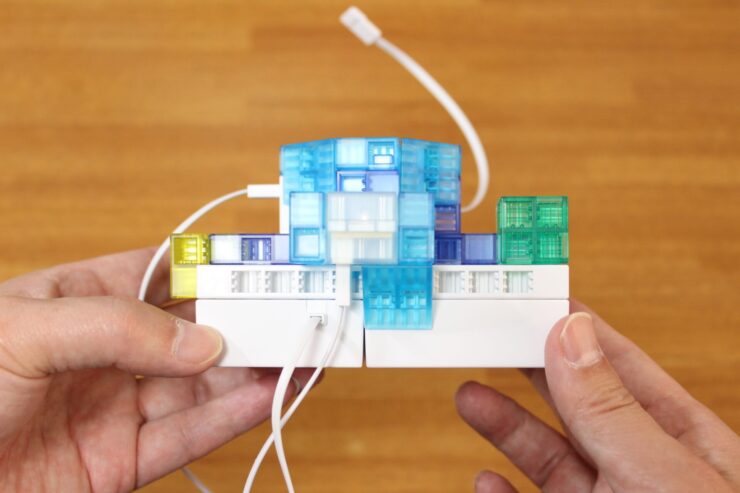
配線後の横から見た写真はこちら。

配線がゴチャっとしていて少し気になりますが、しかたありませんね。
これでカメラが完成したので、ミッション1は終了です。
バッジをゲットしました。

ミッション2 赤外線フォトリフレクタを使ってみよう

ミッション2は「赤外線フォトリフレクタを使ってみよう」です。
赤外線フォトリフレクタを使って、カメラの正面に何かが近づくとLEDが「パシャ」と光るプログラムをつくります。

だんにゃあ
ミッション1で組み立てたカメラを使うよ。
まずは光る部分のプログラミングね。
さいな
プログラムのイメージはどんな感じでしょう?

「もし○なら~」ブロックを使って、「近くにものがあるとき」と「近くにものがないとき」の処理をつくると良さそうです。
プログラムでは、「近い」か「近くない」かを判定する値が必要になります。
センサーの値は、テストモードで調べることができるので数値を表示してみました。
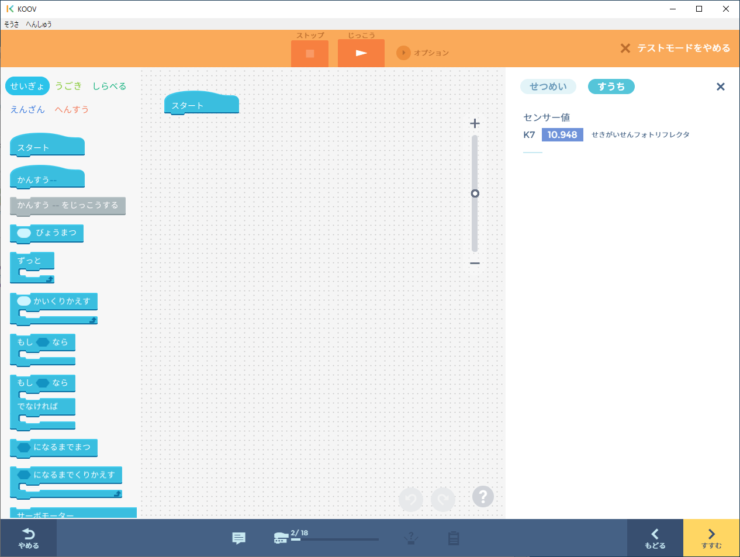
センサーとモノとの距離を変えると数値も変わりました。
しかし、距離が2倍だと数値も2倍ということではなさそうなので、少し注意が必要ですね。
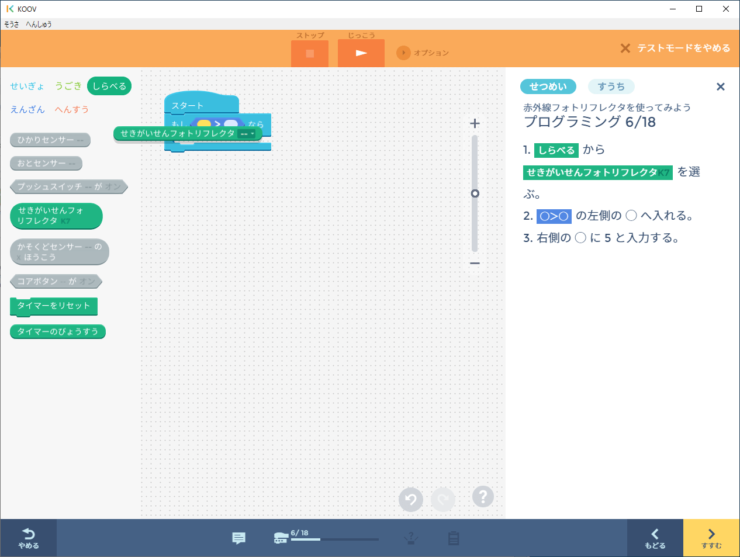
では、説明の通りにプログラミングをしていきます。
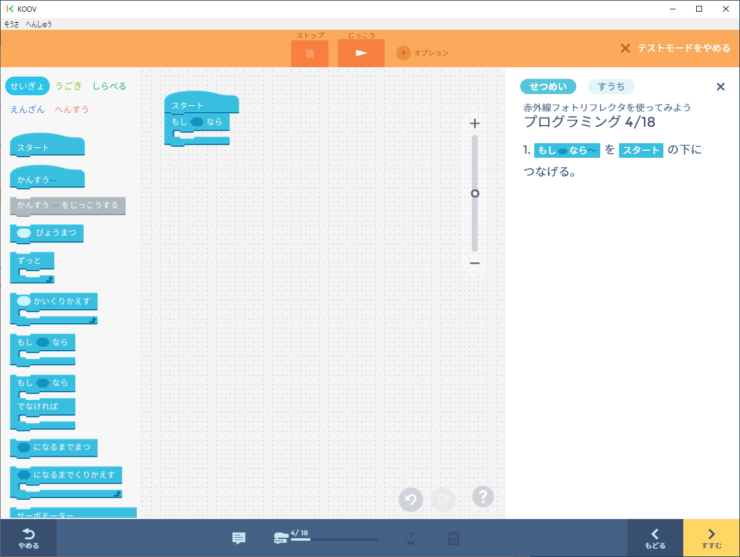
赤外線フォトリフレクタの値は、「しらべる」パレットの「せきがいせんフォトリフレクタ」ブロックを使えば知ることができます。
今回は「もし○なら~」ブロックの条件比較に「せきがいせんフォトリフレクタ」ブロックを使用します。
「しらべる」パレットには、他にもいろいろなセンサーを調べるためのブロックが用意されているわ。
さいな
説明にそってカメラの「パシャ」と光る動きをLEDで作ります。
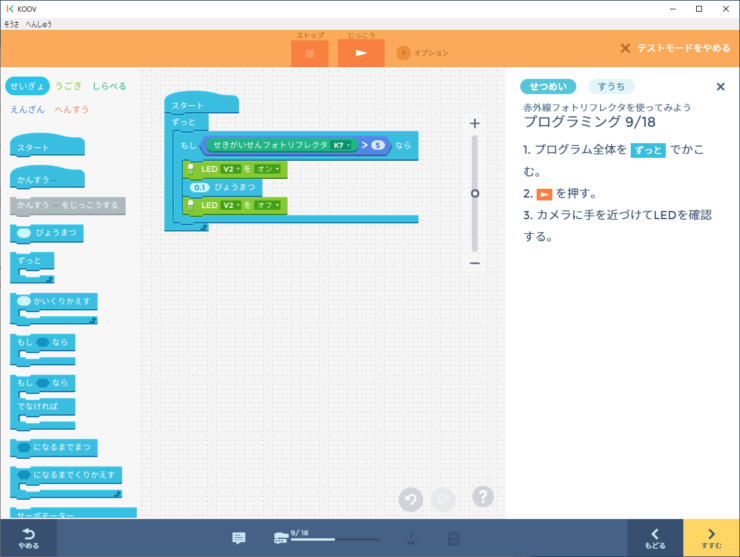
説明通りにプログラミングしたので、実行!
と、ちゃんと課題を用意してくれています。
だんにゃあ
デバッグと呼ばれるプログラムミスを発見する作業の時に、こんな感じで結果を見ながらプログラム調整したりすることもあるよ。
ここで新たにでてきたのが「○になるまでまつ」ブロック!
早速「○になるまでまつ」ブロックを使ってプログラムを修正。
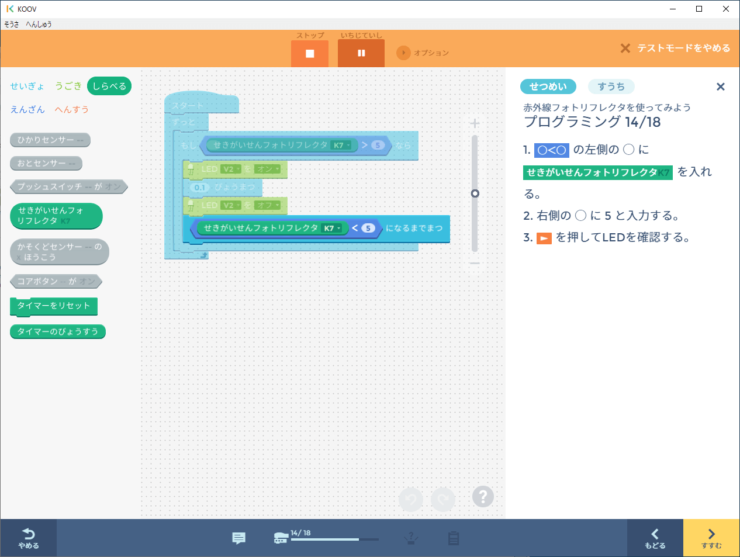
一旦動作は完成しました…が、カメラっぽい光り方ではないということでさらに修正することに!

たしかにこちらの方が光り方がカメラっぽいです。
ぶっちゃけ、どっちでもいいかも。
さいな
だんにゃあ
プログラマーにはこだわりも必要だよ!
これでミッション2は終了です。
バッジをゲットしました。

ミッション3 ブザーを鳴らしてみよう

ミッション3は「ブザーを鳴らしてみよう」です。
ブザーを使って、カメラから「ピピッ」という音を鳴らします。

ミッション3では音の方をつくるのね。
さいな
だんにゃあ
カメラは音もダイジ!

単純に音を2回鳴らせばいいだけですね。
単純かな?
さいな
では、音を鳴らすプログラムをつくります。
プログラム上では音の高さを数字で表します。
入力時には鍵盤も表示されるのでピアノができる人なら数字を意識しなくても鍵盤を選択するだけで数字を入力することもできます。

音が出るといっきに楽しい気持ちになったわ。
さいな
ドレミを連続して順番にならします。

これ楽しい~。
さいな
だんにゃあ
プログラミングは結果が現れるとテンション上がるよね。
ここまでで音を鳴らす練習ができたので、話を戻してカメラの「ピピッ」を作っていきます。
説明通りにプログラムを作成し、実行!

「ピッ」と鳴りました。「ピピッ」じゃない?!
…ここでも実際にありがちなミスが用意されていました。
自分がプログラムを間違えて作ったのかと思っちゃったわ…
さいな
だんにゃあ
プログラムの特徴をしるために間違えるシナリオなんだよ。
あせらず進めていこうね。
「ブザーをとめる」ブロックを使って音を区切るように修正します。
さらに音がシャキッと聞こえるように音の長さととめる時間を調整しました。

時間を変えるだけで音の印象ってけっこう変わるんだね。
さいな
だんにゃあ
プログラマーはこういうところ結構こだわってつくるんだよ。
これでミッション3は終了です。
バッジをゲットしました。

ミッション4 カメラをプログラムしよう

ミッション4は「カメラをプログラムしよう」です。
LEDの「パシャ」とブザーの「ピピッ」、そしてもうひとつの効果音を組み合わせてカメラの動きを完成させます。

プログラムのイメージを確認します。

ミッション2のプログラムに効果音の部分を追加すれば良さそうですね。
すぐにできそうね。
さいな
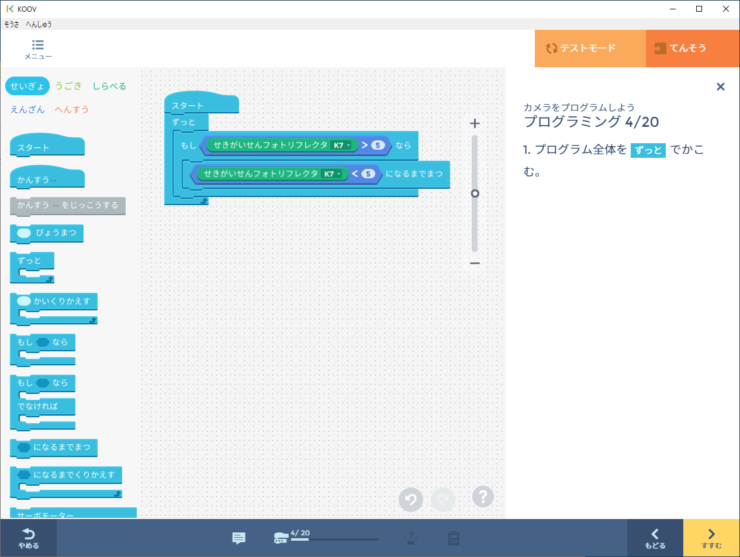
では、まずプログラムの骨組みをつくります。
だんにゃあ
「ずっと」や「もし」でプログラムの流れだけ先につくるってことだよ。
さて、次は?
…「かんすう」ブロック!
「かんすう」なんて聞いてないわ!

さいな
だんにゃあ
「かんすう」は同じプログラムを何度も使う時にとても便利なんだ。
関数(かんすう)は、プログラミングではとてもダイジな機能です。
「かんすう」を使うとスッキリしたシンプルなプログラムになるからです。
スッキリしたシンプルなプログラムになると次のいいことがあります。
- 見やすいのでミスが減る。
- 機能追加(変更)がやりやすい。
- プログラム全体を把握しやすい。
簡単そうに思えて、とても奥が深い「かんすう」、これをこの段階で教えるKOOVにおどろきです。(良い意味)
「かんすう」は、説明通りにプログラムしていけば簡単にできました。
だんにゃあ
今回はかんすうの名前を「buzzer1」にしたよ。
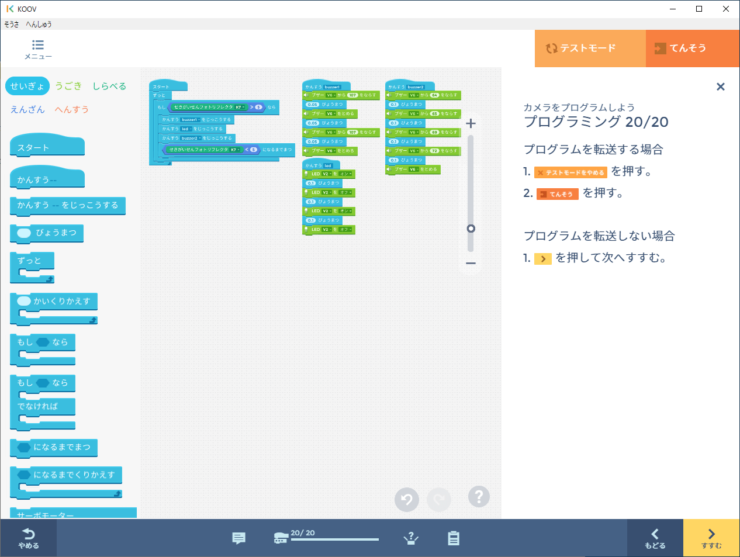
かんすうの呼び出しは「かんすう — をじっこうする」ブロックを使います。

という感じで関数を3つ使ったプログラムが完成しました。
なんだかわかりにくくなった気がするわ。
さいな
だんにゃあ
関数が完成すると、その関数が何をしてくれるかだけ知っていればいいだけだから、中は見る必要がなくなるんだよ。
プログラムの動きを確認し完了。
これでミッション4は終了です。
バッジをゲットしました。

全てのミッションをクリアしたのでステージクリアです。

はじめてのロボットプログラミング ステージ4「きょりの検知と音の表現」のまとめ
今回は、ソニーのオンライン学習サービス「CREATE by KOOV」の、はじめてのロボットプログラミング ステージ4「きょりの検知と音の表現」の体験内容を紹介しました。
ステージ4「きょりの検知と音の表現」では、赤外線フォトリフレクタとブザーを使って、人やものを検知してカシャっと動く、まるでカメラなロボットをつくりました。
ブザーは、好きな高さの音が出せることがわかったわ。
さいな
だんにゃあ
「かんすう」ブロックについても勉強できたね。
次のステージは「DCモーターで回転運動」です。
【KOOV】はじめてのロボットプログラミング ステージ5「DCモーターで回転運動」
前のステージ「ボタンと光センサーの組み合わせ」の記事はこちらです。
【KOOV】はじめてのロボットプログラミング ステージ3「ボタンと光センサーの組み合わせ」
「CREATE by KOOV」公式サイトはこちらです。